WINAMICS Brushless Hub Motor Solutions: End-to-End Capabilities from Design to Delivery
The value of hub motors goes beyond simply "putting a motor in a wheel." What truly determines the user experience and reputation are efficiency, temperature rise, noise levels, reliability, and mass production consistency. WINAMICS provides a one-stop solution for brushless hub motors (BLDC Hub Motors) for applications such as two/three-wheeled electric vehicles, shared mobility, light logistics, and special mobile platforms. This solution covers everything from conceptual design, simulation verification, prototype manufacturing, testing and certification to mass production delivery , making R&D cycles more controllable, performance indicators more concrete, and the supply chain more robust.
During project implementation, we prioritized "Manufacturability (DFM)" and "Testability (DFT)" in the design phase to avoid rework and delays caused by assembly tolerances, magnet bonding, winding processes, or heat dissipation paths, ensuring that each iteration gets closer to mass production targets.
Why choose a brushless hub motor: Incorporating "experience" directly into the product specifications.
Compared to brushed solutions, brushless hub motors typically offer higher efficiency, longer lifespan, and lower maintenance costs. Compared to chain/belt drives, hub direct drive also reduces transmission losses and noise sources. Taking light mobility scenarios as an example, every 3% to 6% increase in overall efficiency often results in a more noticeable improvement in range for the same battery capacity. Furthermore, superior thermal management and magnetic circuit design can significantly mitigate the risks of performance degradation and stalling under conditions such as long slopes, full loads, and frequent start-stop cycles.
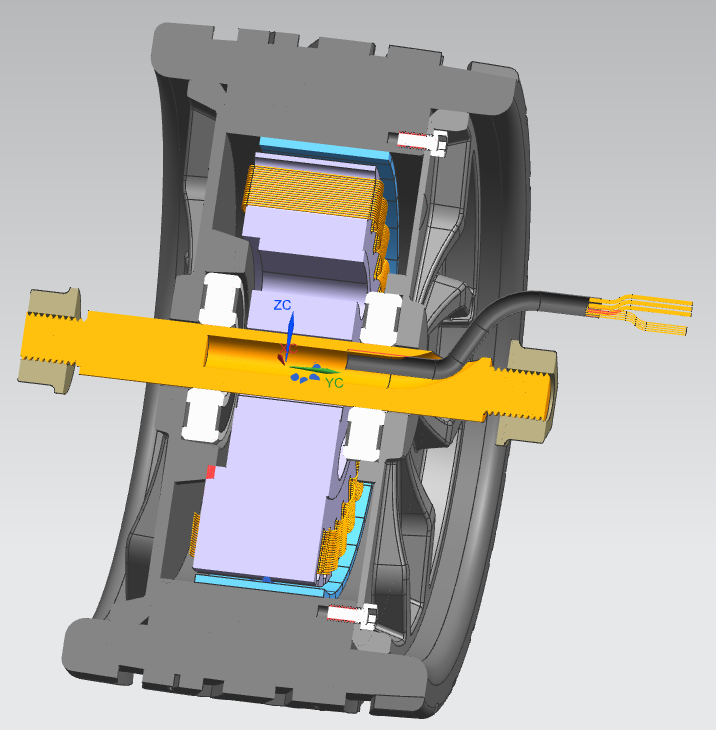
More importantly, hub motors are mechatronic products: the magnetic circuit, windings, bearings, seals, corrosion protection, wiring harness, control algorithm, thermal path, and assembly process are all interconnected. Optimizing a single point can easily lead to unintended consequences. WINAMICS' approach is to establish performance boundaries using systems engineering thinking, and to get the key indicators right the first time, focusing on the target operating conditions.
WINAMICS End-to-End Delivery: From Demand to Mass Production, Key Milestones are Clear and Controllable
We break down projects into reusable, quantifiable delivery milestones to ensure each step is supported by data, avoiding reliance on "experience-based guesswork." A typical project timeline (adjusted based on power range, structural complexity, and certification requirements) is as follows:
| stage |
Main output |
Reference period |
Typical verification points |
| Requirements clarification/Working condition definition |
PRD, operating condition matrix, performance boundary |
3–7 days |
Load curve, speed range, ambient temperature/wading |
| Electromagnetic/thermal/structural simulation |
Solution comparison, efficiency map, temperature rise prediction |
1–3 weeks |
Peak torque, cogging torque, and risk of thermal saturation |
| Prototype EVT |
Prototype, assembly process, initial BOM |
2–5 weeks |
Initial tests of efficiency, noise, temperature rise, and waterproofing. |
| Design Validation DVT |
Design freeze, reliability test report |
3–6 weeks |
Durability/Salt spray/Vibration/Immersion and sealing |
| Pilot production validation of PVT/mass production introduction |
SOP, gauges, process FMEA |
2–6 weeks |
Consistency, yield, critical process CPK |
Reference data explanation: Under the premise of a mature supply chain and clear demand, the time from project initiation to small-batch trial production for lightweight customized projects can generally be controlled within 8–16 weeks ; for projects with complex structures (high protection, low noise, high torque density) or requiring additional certification, the cycle will be correspondingly longer.
Core design capability: Synergistic collaboration among electromagnetics, structure, materials, and processes.
WINAMICS' brushless hub motor design does not pursue "the ultimate in a single parameter," but rather strives for a balanced optimization of efficiency, torque, temperature rise, noise, lifespan, and cost . The following are common design considerations (which can be adjusted according to your vehicle platform and controller strategy):
Electromagnetic Design and Efficiency Map
By adjusting the pole-slot ratio, winding scheme (concentrated/distributed), magnet grade, and demagnetization margin design, peak torque and high-speed efficiency are balanced. Common goals include achieving an overall efficiency of 80%–90% (depending on power range, control strategy, and gear diameter) and reducing cogging torque to improve low-speed jitter and "pushing resistance".
Thermal Management and Continuous Power
The heat dissipation path of the hub structure is "shorter but more congested," so we will focus on optimizing the stator potting/thermal interface, end cover thermal conductivity, and air gap thermal resistance. Typical reliability constraints: winding insulation class and critical point temperature rise control; in a 25°C environment, the continuous operating temperature rise reference target is usually controlled within the range of 45–70°C (set according to insulation class and life requirements).
Structure and reliability (bearings/seales/corrosion protection)
Bearing selection takes into account load spectrum, impact, installation preload, and lifespan; the sealing structure balances low friction with waterproofing and dustproofing. Common targets: protection levels can cover IP54–IP67 (optional), and sealing verification and corrosion protection design are carried out for rainwater, mud, and cleaning conditions.
NVH and riding experience
To address electromagnetic noise, structural resonance, and assembly misalignment, we anticipate risks during the simulation phase and improve "whistling" and "resonance points" through skewed slot/magnetic pole optimization, end cap stiffness, and dynamic balancing strategies. In mass production, dynamic balancing and concentricity control have a significant impact on the user experience, especially at medium and high speeds.
Testing and Verification: Turning "Reliability" into Reproducible Data
Once installed in a vehicle, in-wheel motors face the real world around the clock: high temperatures, heavy rain, constant vibration, frequent braking, and unpredictable user actions. WINAMICS' testing system emphasizes "close to actual operating conditions + traceable retesting," covering common tests such as:
- Performance testing: no-load current, efficiency curve, peak/continuous torque, maximum speed, pullback resistance, etc.
- Thermal testing: stator winding temperature rise, end cover/bearing location temperature, thermal saturation under long slope and continuous load.
- Environmental testing: rain/immersion, salt spray (refer to 48–240 hour graded verification), temperature and humidity cycling and corrosion resistance coating durability.
- Mechanical reliability: Vibration, shock, drop and bearing life assessment; reinforcement profiles to be added if necessary.
- Mass production consistency: critical dimension tolerances, magnet consistency, and control of winding resistance and back electromotive force (BEMF) deviations.
Reference data: Under the same voltage platform and wheel diameter conditions, for every 5% increase in motor efficiency, the reduction in overall vehicle energy consumption is often more significant in stop-and-go urban driving conditions; while effectively reducing cogging torque can significantly improve low-speed jerking and pushing resistance, especially having a more direct impact on user experience and complaint rates in shared/rental scenarios.
Mass production delivery and supply chain: Making stability and consistency the default value
Many projects fail not in the design phase, but in mass production: batch magnet fluctuations, potting compound process windows, bearing preload deviations, insufficient wiring harness tension, and poor seal assembly... These problems will manifest as rework rates, abnormal noises, and water ingress within one or two months. WINAMICS focuses more on mass production process capabilities , using data to lock in key aspects.
| Key items for mass production |
Control method |
Reference indicators (can be revised according to project) |
| Dynamic balance and concentricity |
Specialized tooling + factory sampling/full inspection strategy |
Vibration at high speeds is significantly reduced; the risk of rework decreases. |
| Winding resistance and insulation |
Online electrical testing + withstand voltage/insulation testing |
Resistance deviation should be controlled within ±3% to ±5%. |
| Sealing and Protection |
Assembly error prevention + airtight/rain test |
Target IP54–IP67 (configured as needed) |
| Factory consistency |
Serial number tracing + torque/no-load current verification |
The no-load current deviation is recommended to be controlled within ±8%. |
We support collaboration with customers' vehicle platforms, including wiring harness interface definitions, installation dimensions, brake structure adaptation, controller matching recommendations (FOC/square wave), and necessary verification report outputs, facilitating your internal reviews and supplier onboarding.
Applicable scenarios and common selection suggestions: Choose parameters that are "just right".
Different scenarios have different requirements for in-wheel motors: shared mobility prioritizes stability and low maintenance; lightweight logistics prioritizes climbing ability and heat saturation; folding/lightweight vehicles prioritize weight and smooth low-speed operation. Below are some more practical selection directions (for evaluation):
Shared/Rental Two-Wheeled Wheels
Key considerations: low failure rate, sealing, corrosion resistance, low noise, and consistency. Recommendations: Improve protection level, enhance salt spray and immersion testing, and optimize push resistance and cogging torque.
Light logistics/food delivery
Key concerns: Full-load start-up, continuous hill climbing, and temperature rise. Recommendation: Enhance thermal path and continuous power design, and adapt to more robust control strategies and overheat protection logic.
High-end personal travel
Key considerations: Quiet operation, smooth operation, aesthetics, and lightweight design. Recommendations: NVH optimization, dynamic balancing strategies, improved surface treatment, and more precise assembly tolerance control.
Send us your operating conditions to get a complete solution for WINAMICS brushless hub motors.
If you are developing a new model, upgrading an existing platform, or require more stable mass production deliveries, we recommend starting with "operating conditions and installation boundaries": wheel diameter/load, target speed, climbing angle, average daily mileage, wading requirements, controller voltage platform, and installation dimensions. Based on these inputs, we will provide more practical motor recommendations and verification paths.
Note: The data referenced in this article are for common engineering projects in the industry. Specific indicators and cycles will vary depending on power range, wheel diameter, structural form (direct drive/reduction), control strategy and certification requirements. We welcome joint evaluation based on your target operating conditions.












.png?x-oss-process=image/resize,h_100,m_lfit/format,webp)
.png?x-oss-process=image/resize,h_100,m_lfit/format,webp)

.png?x-oss-process=image/resize,h_100,m_lfit/format,webp)

.png?x-oss-process=image/resize,h_800,m_lfit/format,webp)





