











.png?x-oss-process=image/resize,h_100,m_lfit/format,webp)
.png?x-oss-process=image/resize,h_100,m_lfit/format,webp)

.png?x-oss-process=image/resize,h_100,m_lfit/format,webp)
공유/대여 이륜차
주요 고려 사항: 낮은 고장률, 밀봉성, 내식성, 저소음 및 일관성. 권장 사항: 보호 수준 향상, 염수 분무 및 침수 시험 강화, 그리고 푸시 저항 및 코깅 토크 최적화.
허브 모터의 가치는 단순히 "바퀴에 모터를 장착하는 것" 이상의 의미를 지닙니다. 사용자 경험과 평판을 좌우하는 핵심 요소는 효율성, 온도 상승, 소음 수준, 신뢰성, 그리고 양산 일관성입니다. WINAMICS는 이륜/삼륜 전기차, 공유 모빌리티, 경량 물류, 특수 모바일 플랫폼 등 다양한 분야에 적용 가능한 브러시리스 허브 모터(BLDC 허브 모터)의 원스톱 솔루션을 제공합니다. 이 솔루션은 개념 설계, 시뮬레이션 검증, 프로토타입 제작, 테스트 및 인증부터 양산 납품까지 모든 단계를 포괄하여 연구 개발 주기를 효율적으로 관리하고, 성능 지표를 구체화하며, 공급망을 더욱 견고하게 만듭니다.
프로젝트 구현 과정에서 조립 공차, 자석 접합, 권선 공정 또는 열 방출 경로로 인한 재작업 및 지연을 방지하기 위해 설계 단계에서 "제조 용이성(DFM)"과 "테스트 용이성(DFT)"을 우선시하여 각 반복 작업이 대량 생산 목표에 더욱 가까워지도록 했습니다.
브러시 모터 방식과 비교했을 때, 브러시리스 허브 모터는 일반적으로 더 높은 효율, 더 긴 수명, 그리고 더 낮은 유지보수 비용을 제공합니다. 체인/벨트 구동 방식과 비교하면, 허브 직접 구동 방식은 동력 전달 손실과 소음 발생원을 줄여줍니다. 경량 이동 수단을 예로 들면, 전체 효율이 3~6% 향상될 때마다 동일한 배터리 용량에서 주행 거리가 눈에 띄게 증가하는 경우가 많습니다. 또한, 우수한 열 관리 및 자기 회로 설계는 긴 경사로, 최대 부하, 잦은 출발/정지 등의 조건에서 성능 저하 및 시동 꺼짐 위험을 크게 줄여줍니다.
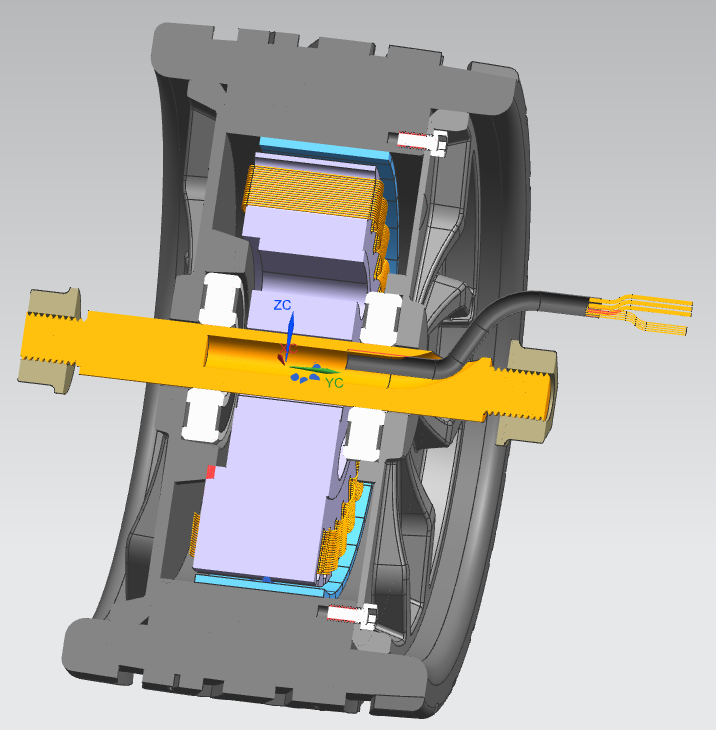
더욱 중요한 것은 허브 모터는 메카트로닉 제품이라는 점입니다. 자기 회로, 권선, 베어링, 씰, 부식 방지, 배선, 제어 알고리즘, 열 경로 및 조립 공정이 모두 서로 연결되어 있습니다. 따라서 단일 지점만 최적화하려고 하면 의도치 않은 결과가 발생할 수 있습니다. WINAMICS는 시스템 엔지니어링 사고방식을 활용하여 성능 한계를 설정하고, 목표 작동 조건에 집중하여 핵심 지표를 처음부터 정확하게 도출하는 접근 방식을 취합니다.
우리는 프로젝트를 재사용 가능하고 정량화 가능한 단계별 진행 상황으로 세분화하여 각 단계가 데이터에 기반하도록 하고, 경험에 의존한 추측에 의존하는 것을 방지합니다. 일반적인 프로젝트 일정(전력 범위, 구조적 복잡성 및 인증 요구 사항에 따라 조정됨)은 다음과 같습니다.
참고 자료 설명: 안정적인 공급망과 명확한 수요가 있는 경우, 경량 맞춤형 프로젝트의 경우 프로젝트 착수부터 소량 시범 생산까지 일반적으로 8~16주 이내에 완료할 수 있습니다. 복잡한 구조(높은 보호 기능, 저소음, 높은 토크 밀도)를 요구하거나 추가 인증이 필요한 프로젝트의 경우, 소요 기간은 그에 따라 더 길어집니다.
WINAMICS의 브러시리스 허브 모터 설계는 "단일 매개변수의 최고 성능"을 추구하는 것이 아니라 효율성, 토크, 온도 상승, 소음, 수명 및 비용 의 균형 잡힌 최적화를 목표로 합니다. 다음은 일반적인 설계 고려 사항입니다(차량 플랫폼 및 제어 전략에 따라 조정 가능).
극-슬롯 비율, 권선 방식(집중/분산), 자석 등급 및 감자 여유 설계를 조정하여 최대 토크와 고속 효율의 균형을 맞춥니다. 일반적인 목표는 출력 범위, 제어 전략 및 기어 직경에 따라 80%~90% 의 전체 효율을 달성하고 코깅 토크를 줄여 저속 진동 및 "추진 저항"을 개선하는 것입니다.
허브 구조의 열 방출 경로는 "더 짧지만 더 혼잡"하므로, 고정자 포팅/열 인터페이스, 엔드 커버의 열전도율 및 공극 열저항 최적화에 중점을 둘 것입니다. 일반적인 신뢰성 제약 조건으로는 권선 절연 등급 및 임계점 온도 상승 제어가 있습니다. 25°C 환경에서 연속 작동 온도 상승 기준 목표는 일반적으로 45~70°C 범위 내에서 제어됩니다(절연 등급 및 수명 요구 사항에 따라 설정).
베어링 선정 시 하중 범위, 충격, 설치 예압 및 수명을 고려하며, 밀봉 구조는 낮은 마찰과 방수 및 방진 기능을 균형 있게 제공합니다. 일반적인 목표는 IP54~IP67 (선택 사항)의 보호 수준을 달성하는 것이며, 빗물, 진흙 및 세척 조건에 대한 밀봉 검증 및 부식 방지 설계가 수행됩니다.
전자기 잡음, 구조적 공진 및 조립 불량 문제를 해결하기 위해 시뮬레이션 단계에서 위험 요소를 예측하고, 경사 슬롯/자극 최적화, 엔드 캡 강성 및 동적 밸런싱 전략을 통해 "휘파람 소리"와 "공진점"을 개선합니다. 대량 생산에서 동적 밸런싱 및 동심도 제어는 특히 중속 및 고속에서 사용자 경험에 상당한 영향을 미칩니다.
차량에 장착된 인휠 모터는 고온, 폭우, 지속적인 진동, 잦은 제동, 예측 불가능한 사용자 동작 등 24시간 내내 극한의 환경에 노출됩니다. WINAMICS의 테스트 시스템은 "실제 작동 조건에 가까운 환경 + 추적 가능한 재테스트"를 강조하며 다음과 같은 일반적인 테스트를 포함합니다.
참고 자료: 동일한 전압 플랫폼 및 휠 직경 조건에서 모터 효율이 5% 증가할 때마다 전체 차량 에너지 소비량 감소 효과는 정체 구간이 많은 도심 주행 조건에서 더욱 두드러지게 나타납니다. 또한, 코깅 토크를 효과적으로 줄이면 저속 주행 시 발생하는 울컥거림과 차량의 저항을 크게 개선할 수 있으며, 특히 공유/렌터카 이용 시 사용자 경험과 불만 발생률에 직접적인 영향을 미칩니다.
많은 프로젝트가 설계 단계가 아닌 양산 단계에서 실패합니다. 자석 배치 변동, 포팅 컴파운드 공정 오차, 베어링 예압 편차, 배선 하니스 장력 부족, 불량한 씰 조립 등이 그 예입니다. 이러한 문제들은 한두 달 안에 재작업률 증가, 이상 소음 발생, 누수 등의 문제로 나타납니다. WINAMICS는 데이터 기반으로 핵심 요소를 강화하여 양산 공정의 효율성을 높이는 데 집중합니다.
당사는 배선 하니스 인터페이스 정의, 설치 치수, 브레이크 구조 적응, 컨트롤러 매칭 권장 사항(FOC/사각파) 및 필요한 검증 보고서 출력을 포함하여 고객 차량 플랫폼과의 협업을 지원함으로써 내부 검토 및 공급업체 온보딩을 용이하게 합니다.
다양한 시나리오에 따라 휠 내장형 모터에 대한 요구 사항이 다릅니다. 공유 모빌리티는 안정성과 낮은 유지보수 비용을 우선시하고, 경량 물류는 등판 능력과 열 방출 성능을 우선시하며, 접이식/경량 차량은 무게와 부드러운 저속 주행을 우선시합니다. 아래는 보다 실용적인 선택 방향(평가용)입니다.
주요 고려 사항: 낮은 고장률, 밀봉성, 내식성, 저소음 및 일관성. 권장 사항: 보호 수준 향상, 염수 분무 및 침수 시험 강화, 그리고 푸시 저항 및 코깅 토크 최적화.
주요 고려 사항: 최대 부하 시동, 지속적인 부하 상승, 온도 상승. 권장 사항: 열 경로 및 연속 전력 설계를 개선하고, 더욱 강력한 제어 전략 및 과열 보호 로직을 적용하십시오.
주요 고려 사항: 저소음 작동, 원활한 작동, 미관 및 경량 설계. 권장 사항: NVH 최적화, 동적 균형 조정 전략, 표면 처리 개선 및 더욱 정밀한 조립 공차 관리.
새로운 모델을 개발하거나 기존 플랫폼을 업그레이드하거나 보다 안정적인 대량 생산 납품이 필요한 경우, "작동 조건 및 설치 제약 조건"부터 시작하는 것이 좋습니다. 여기에는 휠 직경/하중, 목표 속도, 등판 각도, 일일 평균 주행 거리, 도섭 요구 사항, 컨트롤러 전압 플랫폼 및 설치 치수가 포함됩니다. 이러한 정보를 바탕으로 보다 실용적인 모터 추천 및 검증 방안을 제공해 드립니다.
참고: 본 문서에 언급된 데이터는 업계의 일반적인 엔지니어링 프로젝트를 기준으로 합니다. 구체적인 지표 및 사이클은 출력 범위, 휠 직경, 구조 형태(직접 구동/감속), 제어 전략 및 인증 요건에 따라 달라질 수 있습니다. 목표 운영 조건에 기반한 공동 평가를 환영합니다.

.png?x-oss-process=image/resize,h_800,m_lfit/format,webp)





